Yamaha Motor lance un cobot 7 axes et un contrôleur DC 48 V dédié
Le 23 octobre 2025, Yamaha Motor Co., Ltd. a dévoilé son tout premier cobot commercial : un robot collaboratif à 7 axes conçu pour travailler aux côtés des humains avec fluidité et souplesse. Ce lancement s’accompagne de la présentation d’un contrôleur compact dédié, alimenté en DC 48 V.
Contexte & stratégie
Yamaha Motor renforce ainsi sa présence sur le marché de l’automatisation industrielle. Jusqu’à aujourd’hui, son offre comprenait des robots à axe unique, des robots SCARA et des modules de convoyeurs linéaires, mais ce cobot vient étendre son portefeuille vers des solutions encore plus flexibles.
Les raisons de ce développement sont multiples :
-
La production industrielle tend vers des cycles de vie de produit plus courts, des gammes plus variées et des volumes plus faibles (“high-mix, variable-volume”).
-
Le besoin d’automatisation collaborative (robots travaillant aux côtés des humains) est en forte progression, notamment en réponse aux problèmes de pénurie de main-d’œuvre, à la hausse des coûts salariaux, et à la montée de technologies comme l’IoT et la mobilité électrique.
-
Yamaha vise divers secteurs : l’automobile, l’électroménager, la métallurgie, mais aussi des industries plus “légères” comme l’alimentaire, les cosmétiques ou le textile.

Principales caractéristiques du cobot
-
Configuration à 7 axes
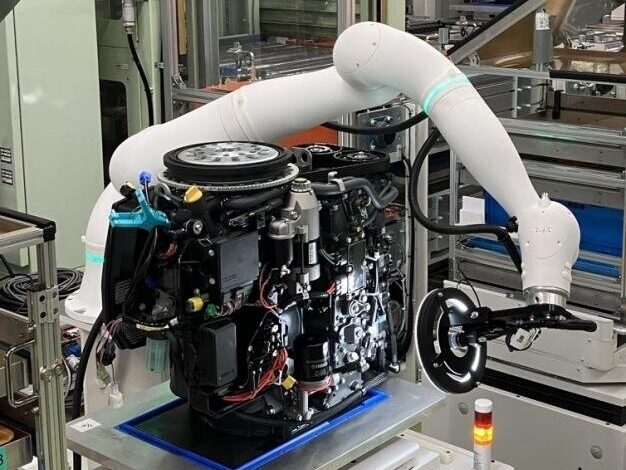
Le cobot de Yamaha est structuré sur sept axes : trois axes de translation (X, Y, Z), trois axes de rotation (roulis, tangage, lacet). Plus un axe de torsion équivalent au “coude” humain. Cette architecture permet au bras du robot d’atteindre des zones difficiles d’accès, de contourner des obstacles, et d’adopter des trajectoires plus souples et naturelles.-
Portée maximale : 1 300 mm.
-
Capacité de charge : jusqu’à 10 kg.
-
-
Mouvements souples grâce aux capteurs de couple
Chaque axe du robot intègre un capteur de couple de haute précision. Cela permet une “compliance control” : le robot peut ajuster sa force de façon active et flexible selon les contacts externes.-
En cas de contact avec un opérateur, le cobot peut détecter l’impact et s’arrêter immédiatement, ce qui accroît la sécurité.
-
Il peut réaliser des tâches délicates : par exemple insérer ou retirer des connecteurs, polir des surfaces courbes, etc.
-
-
Modes de fonctionnement
-
Mode collaboratif (vitesse réduite) : pour travailler en toute sécurité à proximité des humains.
-
Mode haute vitesse : pour des opérations dans des zones sécurisées ou clôturées, avec des mesures de protection adéquates.
-
Il est en cours de certification de sécurité fonctionnelle par TÜV SÜD, une tierce partie indépendante.
-
-
Programmation accessible
Outre la programmation traditionnelle (texte), le cobot supporte la programmation par blocs (block programming) : des blocs d’instructions sont assemblés visuellement pour créer des séquences, ce qui rend la programmation intuitive, même pour les novices. -
Design “humain-friendly”
-
Bras aux formes arrondies, sans angles saillants : pour minimiser l’impression de froideur ou d’intimidation.
-
Finition mate (sans brillance) : donne une sensation de chaleur, de douceur et évite l’aspect “robot industriel effrayant”.
-
-
Contrôleur dédié et mobilité
-
Le contrôleur est très compact, ce qui réduit l’encombrement des panneaux de commande.
-
Il dispose d’un pendant (interface de commande) simple, utilisable même sans grande expertise.
-
Entrée en DC 48 V : cela permet de partager la même batterie que les AGV (Automated Guided Vehicles) ou AMR (Autonomous Mobile Robots).
-
Grâce à cette compatibilité, on peut monter le cobot directement sur un AGV/AMR. Ce qui permet de combiner mobilité et automatisation.
-
Impact et perspectives
Avec cette nouvelle offre, Yamaha Motor renforce sa capacité à fournir des solutions globales d’automatisation (“total solutions”) : robots, contrôleurs, transport automatisé.
En combinant des cobots flexibles avec des AGV/AMR, Yamaha peut proposer des architectures de production plus agiles. Particulièrement adaptées aux usines modernes : lignes de production variées, changements fréquents, et forte interaction homme-machine. De plus, en participant à des salons comme l’iREX 2025, Yamaha montre qu’elle mise sur l’avenir. Des “smart factories” où la mobilité robotisée et la collaboration sont au cœur de la production.
FAQ – Tout savoir sur le nouveau cobot Yamaha
2 : En quoi ce cobot Yamaha est-il innovant ?
7 axes pour une flexibilité proche d’un bras humain
Capteurs de couple sur chaque articulation
Deux modes : collaboratif + haute vitesse
Programmation simplifiée par blocs
Compatibilité DC 48 V idéale pour la robotique mobile
3 : Quelle est sa portée et sa charge utile ?
Portée : 1 300 mm
Charge maximale : 10 kg
4 : Est-il sûr pour les opérateurs ?
Oui, grâce au contrôle de couple qui détecte les contacts et stoppe le mouvement immédiatement. Une certification de sécurité fonctionnelle est visée.
5 : Peut-on le monter sur un AGV ou un AMR ?
Oui. Son alimentation DC 48 V permet d’utiliser la même batterie que les robots mobiles, facilitant son intégration sur des plateformes autonomes.
6 : Dans quels secteurs ce cobot peut-il être utilisé ?
Automobile, électronique, électroménager, métallurgie, alimentaire, cosmétique, textile…
Il est conçu pour les environnements nécessitant précision, sécurité et flexibilité.
7 : Est-il adapté aux débutants en robotique ?
Oui. La programmation par blocs permet à un non-spécialiste de créer rapidement des séquences d’actions sans code complexe.
8 : Quand sera-t-il disponible ?
Il s’agit du premier modèle commercialisé par Yamaha. D’autres informations sur la distribution et les tarifs seront annoncées prochainement.

Restez en avance sur la robotique, les humanoides et l’industrie du futur.
Inscrivez votre email pour accéder à l’essentiel