Comment fonctionne un robot humanoïde ?
Face à la technologie, il est difficile de ne pas être curieux sur la manière dont marche un appareil. C’est d’autant plus vrai face au concentré de technologies dont le robot humanoïde.
Pour rappel, un robot humanoïde est un robot qui ressemble à un humain. Il a généralement une tête, un torse, deux bras et deux jambes. Néanmoins, il arrive souvent que l’appareil ne possède qu’une seule partie qui rappelle l’être humain. A priori, créer un tel engin doit être compliqué, et c’est bien vrai. Après tout, c’est la cristallisation de nombreux savoirs de l’homme.
Les principaux composants d’un robot humanoïde
Les robots humanoïdes présentent peu de différences par rapport aux robots en général. Tout comme ces derniers, ils ont besoin de capteurs, d’actionneurs et d’un système embarqué pour fonctionner. Le tout est monté sur un squelette qui supporte le poids de toute la machine. Celui-ci permet également de protéger les composants de l’appareil.
Le système embarqué du robot
Le système embarqué, comme pour les humains, est le cerveau du robot humanoïde. C’est ce qui lui permet de fonctionner. Habituellement, le système embarqué de ce dernier repose sur une intelligence artificielle (IA). Pour le robot Ameca, Engineered Arts affirme que son système peut être catégorisé comme une IA. Néanmoins, le constructeur a assuré que c’est plus compliqué que cela.

Cependant, ce type de système embarqué est surtout destiné aux robots qui doivent effectuer diverses tâches de manière polyvalente. Les machines chargées des tâches répétitives peuvent entre autres embarquer un logiciel.
Par ailleurs, ces systèmes ont besoin d’énergie, tout comme les ordinateurs, pour fonctionner. Ainsi, les constructeurs peuvent choisir entre un générateur électrique, une batterie ou moteur à essence. Du fait de la préoccupation écologique actuelle, celui-ci ne sert sûrement plus dans ce domaine.
Les capteurs
Dans la robotique, un capteur est un appareil qui permet au robot de percevoir son environnement. Ce type d’appareil peut se présenter en deux grandes catégories.
- Les capteurs proprioceptifs :
Cette catégorie sert essentiellement au robot humanoïde de mesurer différentes valeurs internes. Les accéléromètres, les capteurs d’inclinaison et les capteurs de position sont des exemples de ces appareils. Ils mesurent respectivement l’accélération, l’inclinaison et la position du robot ainsi que celle des différentes parties de son corps.
- Les capteurs extéroceptifs :
Les capteurs extéroceptifs, eux, servent à percevoir les valeurs extérieures. Des capteurs tactiles permettent, par exemple, de mesurer les forces que le robot exerce sur un objet. De ce fait, ils sont souvent placés sur le bout des doigts de la machine. Il existe également des capteurs visuels et des capteurs sonores pour aider les robots humanoïdes à répondre aux besoins des utilisateurs.
Par ailleurs, le nombre et le choix de ces capteurs varient fréquemment selon la complexité et les tâches que le robot doit réaliser.
Les actionneurs
Cette dernière partie du robot permet à la machine humanoïde de se mouvoir et d’interagir avec son environnement. Tout comme un humain, ce type d’appareil possède des composants semblables à des articulations et des muscles. Ceux-ci permettent au robot humanoïde d’imiter les mouvements des mains. D’après les tâches que doit effectuer la machine, les constructeurs peuvent choisir entre actionneurs hydrauliques, pneumatiques et électriques.

Dans la conception d’un robot humanoïde, les constructeurs font face à plusieurs défis. La manière de permettre à la machine de marcher sur ses deux jambes en fait partie.
Le déplacement d’un robot humanoïde bipède
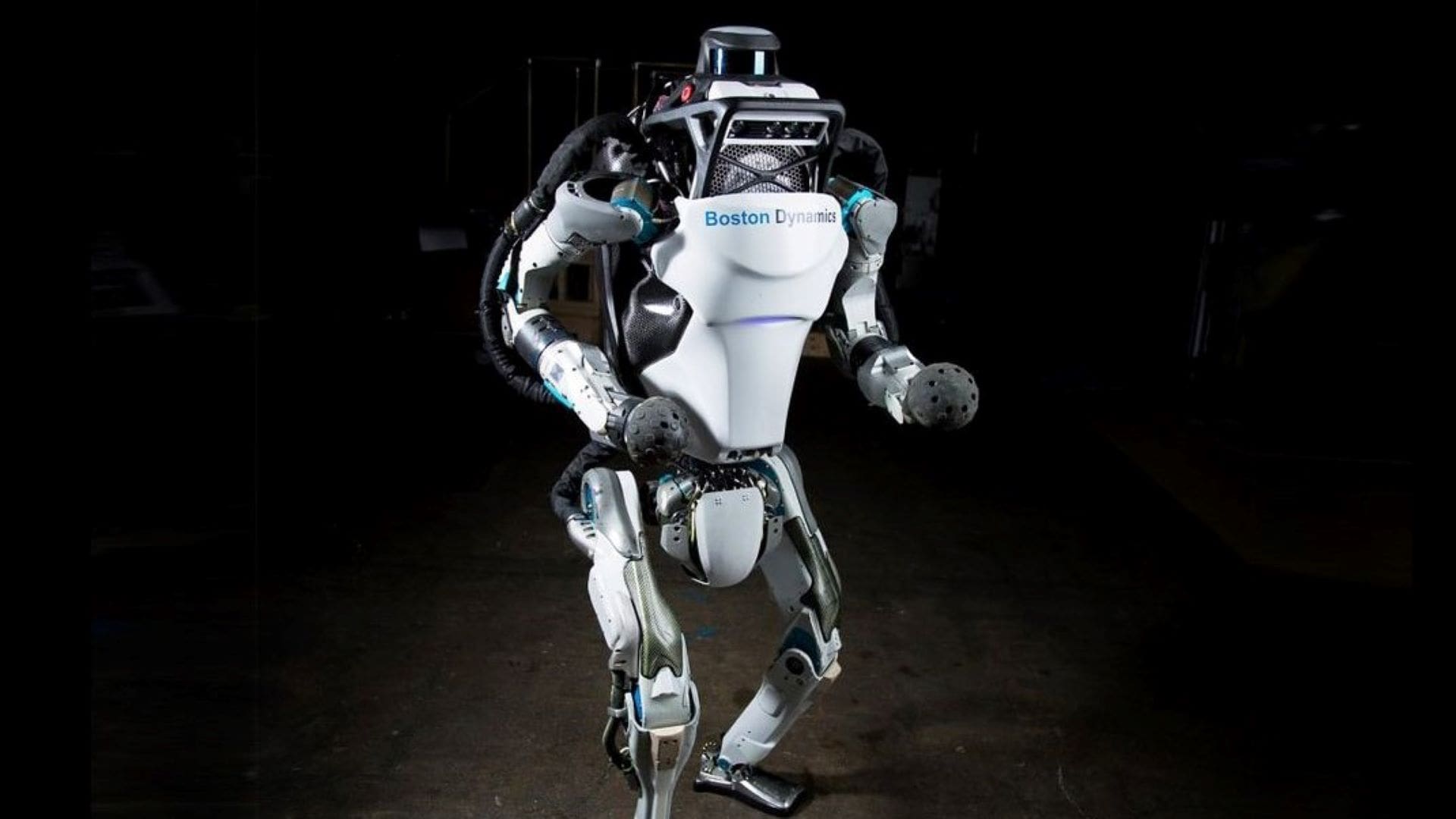
Tout comme les humains, un robot marche humanoïde sur ses deux jambes après un apprentissage ou grâce à un programme destiné à cet effet. Néanmoins, le défi est de faire marcher cet engin sans qu’il tombe. À souligner que si malgré tout, il tombe, les ingénieurs doivent lui donner la capacité de se relever. Atlas de Boston Dynamics illustre bien ce type de robot. Parmi tous les robots bipèdes, Atlas dispose d’une des techniques de déplacement les plus abouties jusqu’à aujourd’hui. Il arrive même à faire du parkour.
La planification et le contrôle
La planification de la trajectoire et des mouvements d’un robot est essentielle pour son déplacement. Même chose pour le contrôle qui est l’exécution réelle de cette trajectoire et de ces mouvements planifiés en amont. À souligner que ces deux étapes sont d’autant plus importantes pour les robots bipèdes.
Afin d’arriver à créer un robot qui marche sur ses deux jambes, les concepteurs doivent notamment travailler la capacité de l’engin à garder l’équilibre. C’est valable qu’il marche, qu’il coure ou même qu’il reste debout. Ce point est très important, car les robots humanoïdes servent souvent à assister les hommes. De ce fait, ils doivent avoir la compétence de parcourir différents sentiers, dont les escaliers.
Pour ce faire, le robot a surtout besoin des informations sur la force de contact avec le support qui lui sert d’appui. Il lui faut également connaître à quel stade de son mouvement il est. C’est d’ailleurs dans ce but que différents capteurs sont placés sur les robots humanoïdes. Toutefois, la véritable solution se base sur un concept lié à la dynamique et au contrôle du déplacement appellé Zero Moment Point (ZMP).
.




