Apprendre par l’observation : des robots en sont déjà capables
Aux États-Unis, des chercheurs sont parvenus à créer un algorithme étonnant. Celui-ci permet à des robots d’apprendre par l’observation.
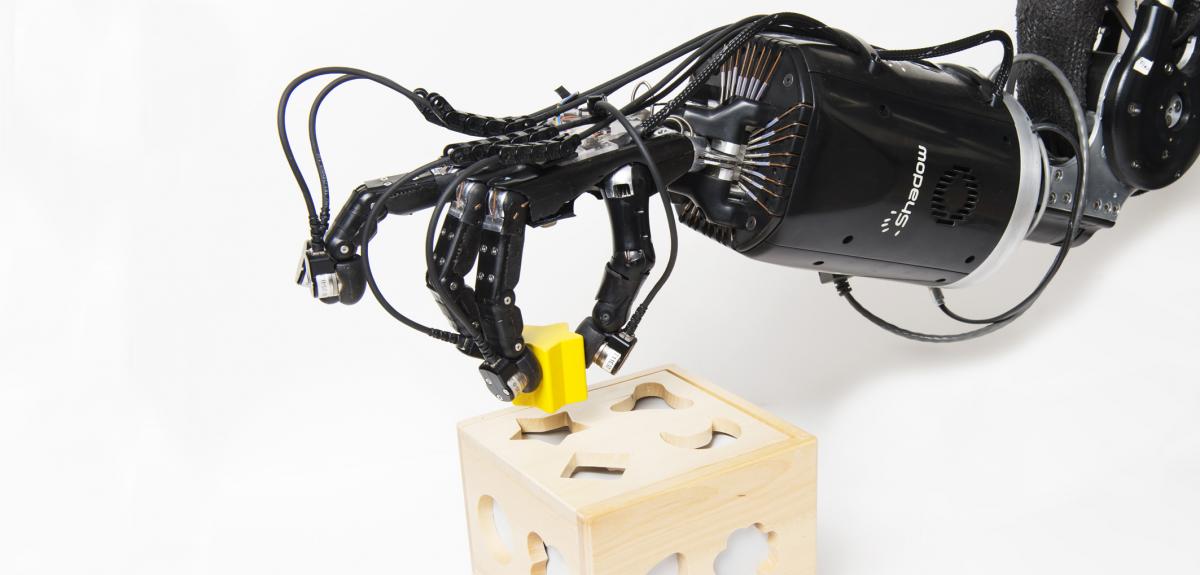
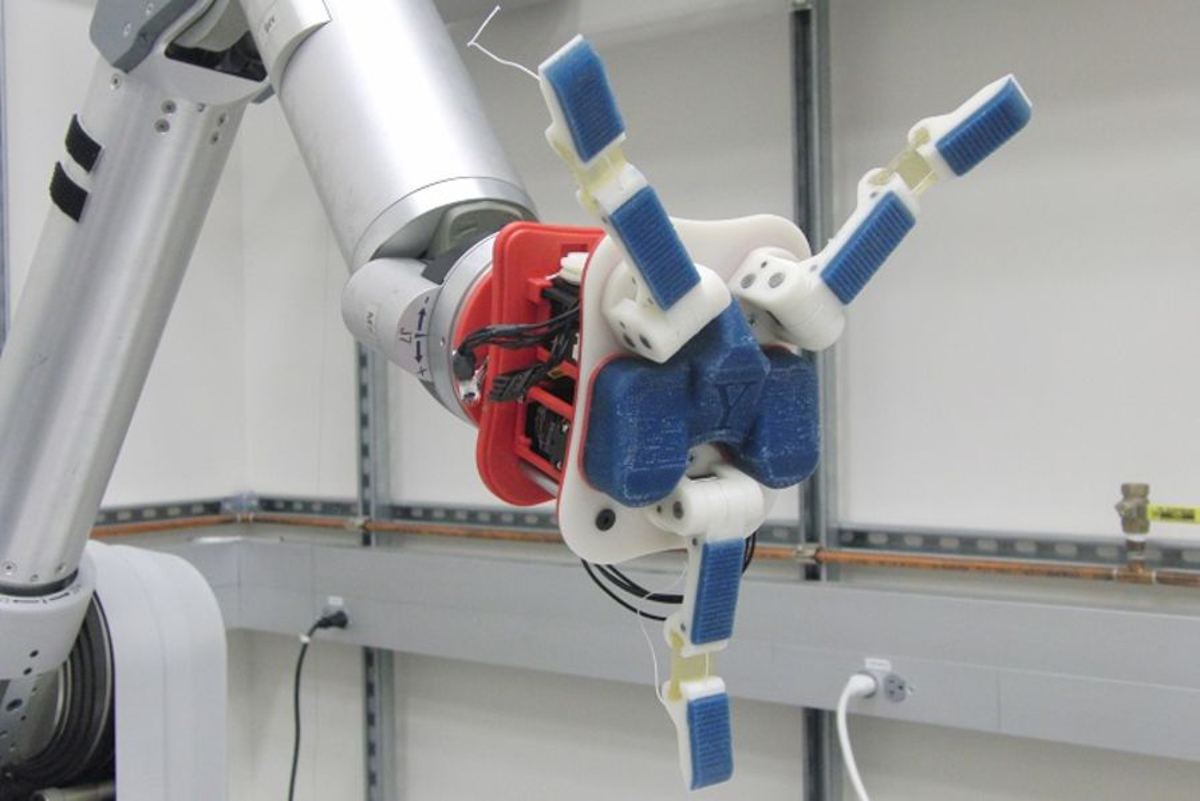
Ce sont des chercheurs en ingénierie mécanique de l’université de Yale, qui ont développé ce nouvel algorithme. Ils l’ont testé sur des mains robotiques et les résultats ont été surprenants. En effet, l’algorithme a permis aux mains robotisées de bouger et de prendre des objets sans utiliser de capteurs. Elles y sont parvenues, simplement en examinant leurs déplacements ainsi que ceux des objets qu’elles devaient saisir. En fait, l’algorithme a permis aux robots de construire petit à petit un modèle de leur propre architecture, composé de joints et de liaisons virtuelles. Il leur a ensuite donné la possibilité d’effectuer des mouvements selon leurs envies.
Comment apprendre par l’observation pourrait faire évoluer les robots ?
Apprendre par l’observation est une technique que les hommes utilisent depuis longtemps pour se former. Mais cette technique peut-elle vraiment être efficace sur des robots ?
Selon des chercheurs du MIT (Massachusetts Institute of Technology), cela est tout à fait possible ! Ils estiment qu’un robot pourrait bien effectuer des tâches, juste en observant comment celles-ci doivent être faites. D’ailleurs, au MIT, des scientifiques sont déjà parvenus à mettre au point une nouvelle technique d’apprentissage pour les robots. Il s’agit du « Planning with Uncertain Specifications » ou PUnS.
Le PUnS privilégie l’observation pour permettre aux automates d’assimiler certaines tâches, même s’ils ne sont pas encore capables de les apprendre seuls. En gros, son but est que les robots puissent raisonner en fonction de ce qu’ils voient. À noter que pour atteindre cet objectif, les scientifiques du MIT ont défini plusieurs critères particuliers. Grâce à ceux-ci, les robots peuvent choisir les tâches avec lesquelles ils auront le plus de chance de réussir. Ainsi, il n’est pas à exclure que dans un futur proche, des robots encore plus performants verront le jour. Grâce au PUnS, ils pourront être optimisés en fonction des besoins bien précis des utilisateurs. Ils pourraient même parvenir à se fixer des objectifs et à improviser, si nécessaire, pour les atteindre.
Selon les chercheurs, le PUnS est beaucoup plus efficace que les autres techniques d’apprentissage traditionnelles. Effectivement, ils ont constaté que les robots qui l’utilisaient commettaient moins d’erreurs (6 sur 20 000 tentatives).
Pourrions-nous bientôt nous passer du codage ?
Jusqu’à aujourd’hui, c’est surtout le codage qui permet aux robots d’apprendre des tâches. Toutefois, avec les découvertes et les progrès effectués par les scientifiques, les choses pourraient rapidement changer. Des robots capables d’apprendre par l’observation et réagir à des directives de leurs usagers pourraient bientôt être créés.

La méthode d’apprentissage mise au point par les chercheurs du MIT ou encore l’algorithme développé à Yale contribuera sûrement à améliorer les performances des robots. Ils pourraient dans ce cas s’adapter à de nouvelles tâches plus facilement juste en regardant des humains les faire.
Récemment, les équipes de Google Robotics ont aussi dévoilé un algorithme. Pour sa part, celui-ci leur a permis d’apprendre à un robot à marcher tout seul. Grâce à ce nouvel algorithme, l’automate de Google a pu se déplacer (en avant et en arrière), en l’espace de quelques heures seulement.
.